
 Автор:
Автор: А.Е. Аствацатуров
Инженерная экология
Учеб. пособие. – Ростов н/Д: Издательский центр ДГТУ. 2006
| Предыдущая |
Глава 8. Человек в технической системе
8.4. Повышение надежности системы
Надежность работы системы во многом зависит от безошибочности действия человека-оператора, управляющего системой. В качестве показателя безошибочности часто используют интенсивность ошибок, вычисляя в расчете на одну операцию по статистическим данным следующим образом:
Pi = (Ni-ni)/Ni ; (1)
li = ni/(Ni×Ti), (2)
где Pi — вероятность безошибочного выполнения операции i-го типа; Ni, ni – общее число выполненных операций i-го вида и допущенное при этом число ошибок; li – интенсивность ошибок i-го вида; Ti – среднее время выполнения операций i-го вида.
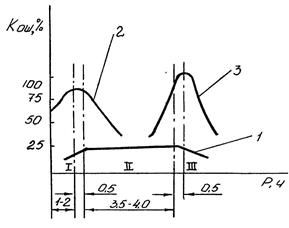
Рис.8.2. Динамика надежности оператора в течение рабочей смены
Вероятность безошибочного выполнения операций зависит от уровня работоспособности, и формулу (1) считают справедливой лишь для периода устойчивой работоспособности оператора, которая отличается значительным подъемом производительности труда после врабатывания в начале смены (рис.8.2). Динамика работоспособности характеризуется тремя основными фазами: I — врабатывание с возрастающей работоспособностью, II — устойчивая работоспособность и III — спад в связи с естественным утомлением (кривая 1). Незначительный спад наблюдается также приблизительно за 0,5 часа до обеденного перерыва, который в основном не связан с изменением работоспособности и поэтому на графике не учтен.
Тенденция распределения количества ошибок Кош в течение смены отражена кривыми 2 и 3. Наложение их на график динамики надежности работы оператора в течение рабочей смены показало, что большая часть ошибок в течение смены, а также негативных явлений, вытекающих из ошибок, например производственных травм, приходится на период, характеризующийся низкой работоспособностью (см.рис.8.2). Период же устойчивой работоспособности (фаза II) отмечается наименьшим числом ошибок, допускаемых работающим в течение данной смены.
Ошибка человека определяется как неправильное выполнение трудовой операции, ведущее к нарушению стандартов технологии и безопасности труда, она может привести к браку в работе, аварии, повреждению оборудования, производственной травме.
При эксплуатации машин, какой бы ни была степень их автоматизации, требуется участие человека-оператора, который не гарантирован от ошибок, независимо от уровня профессиональной подготовки и опыта. Поэтому изучение и прогнозирование надежности системы без учета надежности работы человека не может дать правильных результатов.
Проектировщики пока еще не располагают количественными данными о надежности человека. Для решения чрезвычайно трудной задачи повышения безошибочности действий оператора желательно рассмотреть: 1) основные функциональные, антропометрические и энергетические возможности человека-оператора; 2) характеристики человека-оператора, связанные с видами его деятельности и влиянием нежелательных факторов окружающей среды.
В первом случае надо учесть, что основные функциональные и антропометрические данные человека установлены достаточно точно. Значительную трудность составляет определение энергетики организма оператора, возможности которой не изучены, хотя этот показатель, очевидно, имеет прямую связь с надежностью работы машины и системы в целом.
Безошибочность действий оператора имеет прямую связь с производительностью системы, поэтому проблема изучения энергетики организма оператора и ее влияние на функциональное состояние человека при проектировании машин будущего поколения чрезвычайно актуальна.
Используя данные наблюдений и некоторых экспериментов со строительными, сельскохозяйственными и другими машинами, можно отметить, что ошибки оператора, выражающиеся в некачественном выполнении функций контроля и управления комбайном, являются результатом перегрузок в основном по двум причинам:
1) физическое напряжение при работе с ручным и ножным органами управления, а также частые выходы из кабины, связанные с технологическими и профилактическими операциями;
2) большое количество информации, поступающей в единицу времени (особенно при новых пультах, оборудованных электронной техникой) и превышающей возможности человека по переработке всего комплекса сигналов.
В результате энергетических перегрузок, обусловленных комплексом дополнительных энергозатрат, появляются ошибки, которые можно рассматривать как отказ звена человека, снижающий производительность системы “человек – машина”. Поэтому при выборе содержания рабочего задания следует учитывать весь комплекс нагрузок, возлагаемых на оператора.
Снижение энергетической нагрузки на организм человека в значительной мере может быть достигнуто передачей части функций управления и контроля от человека машине. Эти вопросы взаимосвязаны с компоновкой оборудования в кабине, с выбором эффективного варианта расположения средств "стыковки" машины с оператором.
Второе направление решения задачи повышения надежности оператора связано с рассмотрением зависимостей между характеристиками человека и определенными факторами, понижающими безошибочность его действий. В этом случае целесообразно классифицировать виды деятельности операторов по конкретным типам машин.
При выборе содержания рабочих функций с целью увеличения скорости реакции человека и безошибочности его действий следует учитывать отрицательные факторы внешней среды: шум двигателя и движущихся частей механизмов; вибрацию и толчки в кабине; солнечную радиацию; ненормальные температурные условия; повышенную запыленность и загазованность; физические и психические перегрузки; недостаточную обзорность с рабочего места (вынужденное напряжение рабочей позы); недостаточную совместимость оператора, технического средства и среды.
| Предыдущая |