
 Автор:
Автор: А.Е. Аствацатуров
Инженерная экология
Учеб. пособие. – Ростов н/Д: Издательский центр ДГТУ. 2006
| Предыдущая |
Содержание статьи:
Глава 8. Человек в технической системе
8.2. Человек — управляющее звено системы “человек – техника”
Систему “человек – техника” можно представить как частный случай любой системы организованного воздействия на окружающую среду. Признаком организованного воздействия служит присутствие конкретной программы, нацеленной на выполнение определенных задач. При этом человек, звено системы, в каком-то отношении сходен с техническим звеном. Техническое звено, скажем, машина или сложный агрегат, в условиях перегрузки так или иначе оказывается в аварийном положении с вытекающим из этого отказом в работе. Представим теперь, что человек управляет самолетом. При ручном управлении, например, могут возникнуть обстоятельства, требующие отвлечения внимания летчика от систем управления, допустим, внезапное ухудшение погоды, неполадка в бортовых системах и материальной части самолета и т. д. В таких условиях неизбежно начинает снижаться точность ручного выдерживания заданной траектории и самолет может оказаться в чрезвычайной аварийной ситуации. Усложнение обстановки полета приводит к увеличению количества выполняемых летчиком одновременно операций управления. Это требует дополнительных энергозатрат организма, что при определенных условиях ведет к ошибкам, а в случае значительных перегрузок происходит отказ. Как видим, и в первом, и во втором случае в результате перегрузки звена системы происходит отказ, что совершенно не допустимо.
Рассмотрим взаимодействие человека и машины на примере работы оператора самоходных машин, эксплуатируемых в различных отраслях промышленности.
Оператор машины, руководствуясь информацией (сигналы, подавляемые индикаторами в кабинете, визуальное наблюдение за участком работы и всего окружения), управляет машиной, воздействуя на органы управления. Одновременно человек реагирует на значительный комплекс внешних факторов. К ним относятся: шум, создаваемый при работе двигателя и механизмов машины, вибрация и толчки на рабочем месте, сигналы обратной связи, поступающие к машинам оператора от рулевого управления, рычагов и педалей, звуковые сигналы систем контроля и управления, сигнализирующие об отклонении от нормального режима работы механизмов, температурные колебания, состояние воздушной среды и др. Исходя из информации, получаемой из поступающих сигналов, оператор принимает решения и воздействует на органы управления. Машина, исполняя сигналы управления, изменяет позиции, рабочие параметры и подает оператору новую информацию.
Взаимодействие человека и машины в рассмотренном случае характеризуется непрерывностью и представляет собой систему с замкнутым контуром, в которой информация о сигнале на выходе подается обратно к начальному звену системы. Система с разомкнутым контуром не располагает обратной связью, и в ней взаимодействие между человеком и машиной носит прерывистый характер.
Рассмотрим процесс, в котором оператор корректирует работу машины, непрерывно пытаясь устранить разницу между потребными и реальными выходными сигналами системы, иными словами, обратимся к процессу ручного слежения. Условимся, что вход — это информация, воспринимаемая оператором, выход — действия оператора.
Человека-оператора машины можно рассматривать как звено системы, исполняющее функции восприятия, переработки информации и управления (рис.8.1). При этом условно выведем за пределы машины индикатор и органы управления, представляющие собой как бы узел "стыковки" оператора и машины.
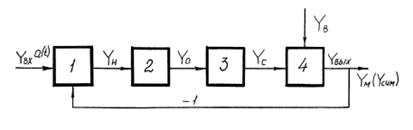
Рис.8.1 Схема взаимодействия оператора и машины: 1-индикатор; 2- человек-оператор; 3-органы управления; 4-машина; Yвх— входной сигнал; Yн— непрерывно изменяющаяся информация; Yo— воздействие на органы управления; Yс – выходной сигнал органа управления; Yвых, Yм, (Yсум) – выходной сигнал машины; (-1) – отрицательная обратная связь
Оператор, находящийся между индикатором (панельным устройством) и органом управления, воспринимает непрерывно изменяющуюся информацию Ун и, воздействуя на органы управления Уо, управляет работой машины. Входные импульсы отображаются машиной на индикаторе, информацию считывает оператор, который предпринимает определенные действия по управлению машиной. Выходной сигнал органов управления Ус преображается машиной в выходной сигнал машины Ум или всей системы Усчм. Таким образом, для оптимизации системы еще в стадии проектирования необходимо учитывать все возможности и ограничения человека, управляющего машиной.
Знание возможностей оператора позволит при проектировании системы правильно распределить функции между человеком и машиной.
| Предыдущая |